
Introducción
La integral definida tiene diversas aplicaciones entre las cuales se destacan el cálculo de áreas entre curvas, la determinación de volúmenes por diversos métodos, el cálculo de longitudes de arcos y, por supuesto, el cálculo de sólidos de revolución. Para poder efectuar estos cálculos, la integral aplica las técnicas de integración y los conceptos matemáticos y geométricos, en forma combinada.
Al finalizar el curso, los estudiantes estarán en condiciones de responder a las siguientes preguntas:
- ¿Qué es un área entre curvas y cómo se calcula?
- ¿Cómo se determina un volumen?
- ¿Cómo se calcula la longitud de un arco?
- ¿Qué es y cómo se calcula un sólido de revolución?
- ¿Cómo se calcula el centro de masa?

Objetivos
Objetivo general
Identificar los diferentes métodos de integración y utilizarlos adecuadamente en el cálculo de integrales indefinidas.
Objetivos específicos
- Aprender a calcular áreas entre dos curvas.
- Calcular volúmenes por discos y por capas.
- Calcular longitudes de un arco.
- Calcular sólidos de revolución.
- Entender y aplicar el concepto de centro de masa y el teorema de Pappus.

Área de una región entre dos curvas
El área limitada por curvas en una región plana se calcula utilizando las integrales definidas y sus propiedades. Para explicar este concepto y la forma de calcularlo se sugiere estudiar los siguientes ejemplos:
A continuación encontrará unos ejemplos del área de una región plana entre dos curvas.
Es importante recordar que para calcular el área de una región utilizando integrales, se debe proceder de acuerdo con las características de la región y las curvas o rectas que la delimitan o la región que la intercepta.
Actividad de aprendizaje
 |
Para poner a prueba tus conocimientos resuleve el ejercicio que a continuación se propone y contesta el siguiente test. |
 |
Material |

Volumen por discos y capas
Una forma de calcular el volumen de sólidos regulares como cilindros o paralelepípedos es utilizar un proceso similar al que se usa para calcular áreas de regiones planas. En tal sentido, a continuación se explicará el método para calcular volúmenes usando capas o discos, el cual permite hacer un cálculo similar al del área de una región, pero teniendo en cuenta la coordenada restante.
Los discos son segmentos o «rebanadas» de un volumen que pueden aproximarse sucesivamente hasta tender al infinitesimal y obtener la mayor aproximación usando la integral para el caso y obteniendo el valor exacto para el calculo del volumen de un sólido.
Teorema 2. Definición de volumen de un sólido
Sea S un sólido que está entre dos planos perpendiculares al eje x en a y b. Si la medida del área de la región plana S, perpendicular al eje x en x, está dada por A(x), donde A es continua en [a, b], entonces la medida del volumen de S está dada por:

Volumen por discos y capas
Volumen por discos
Si tenemos un cilindro de radio r y altura h centrado sobre el eje de las x desde el inicio (0), tal como se muestra a continuación y si decimos que el área de su base es A(x) unidades cuadradas, podemos calcular su volumen así:
A(x)=πr2, por lo tanto su volumen será:

Teorema 3. Método de discos
Para calcular el volumen de un sólido de revolución por el método de discos se procede a través de las siguientes ecuaciones:
| Eje de rotación o revolución horizontal |
 |
| Eje de rotación o revolución vertical |
 |
Haga clic sobre el enlace ver un ejemplo de la aplicación del teorema 3.
 |
Haga clic aquí para ver un ejemplo de la forma en que se calcula el volumen de un sólido en revolución. |

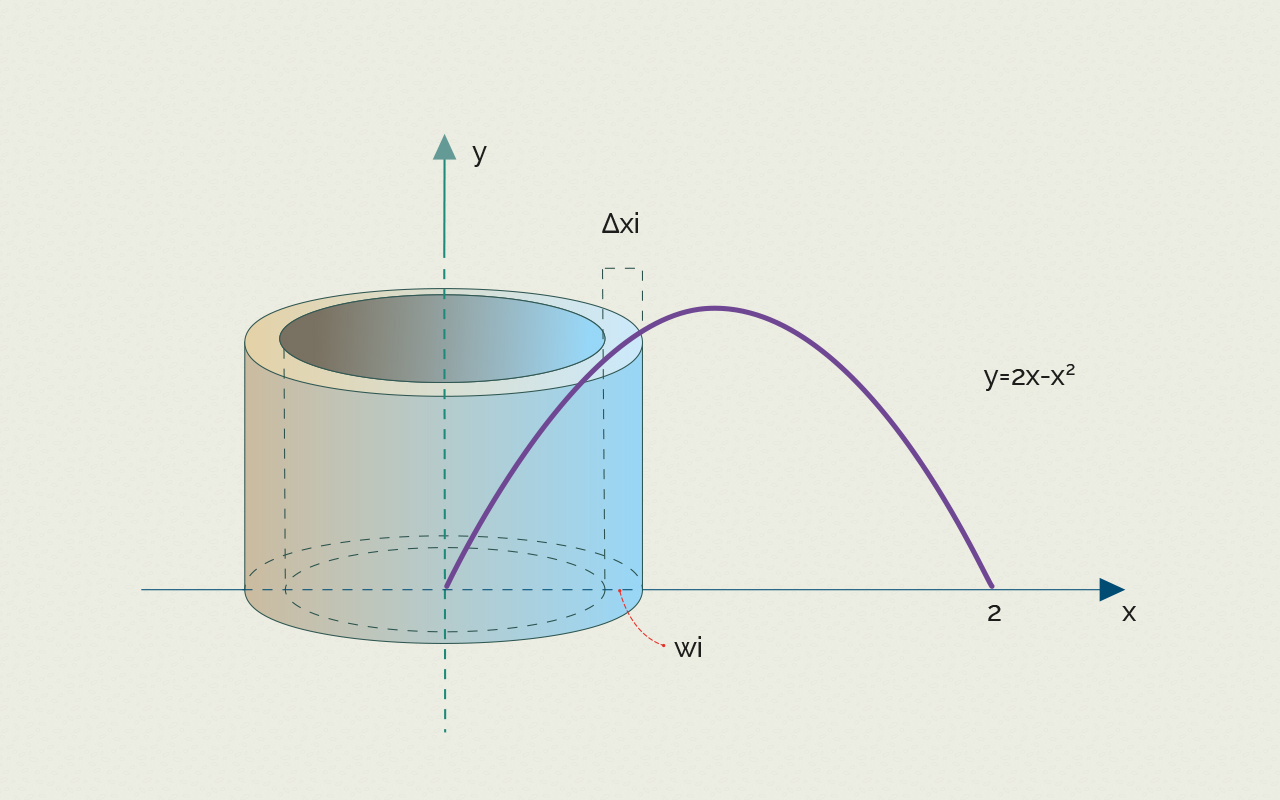

Volumen por discos y capas
Volumen por capas
Cuando se desea calcular el volumen de un cuerpo que no hace frontera con el eje de rotación; es decir, un cuerpo hueco, se traslada el sistema de discos al de arandelas. Para tal fin, se debe hacer uso del siguiente teorema:
Teorema 4. Método de arandelas
Sean f y g dos funciones continuas en el intervalo cerrado [a, b] tales que f(x)≥g(x)≥0 para toda x en [a, b]. Si V unidades cúbicas es el volumen del sólido de revolución generado al girar alrededor del eje x la región plana limitada por las curvas y=f(x) y y=g(x) y las rectas x=a y x=b respectivamente, entonces:

Donde f(x) constituye el radio mayor (R) y g(x) el radio menor (r) de la muestra o rectángulo.
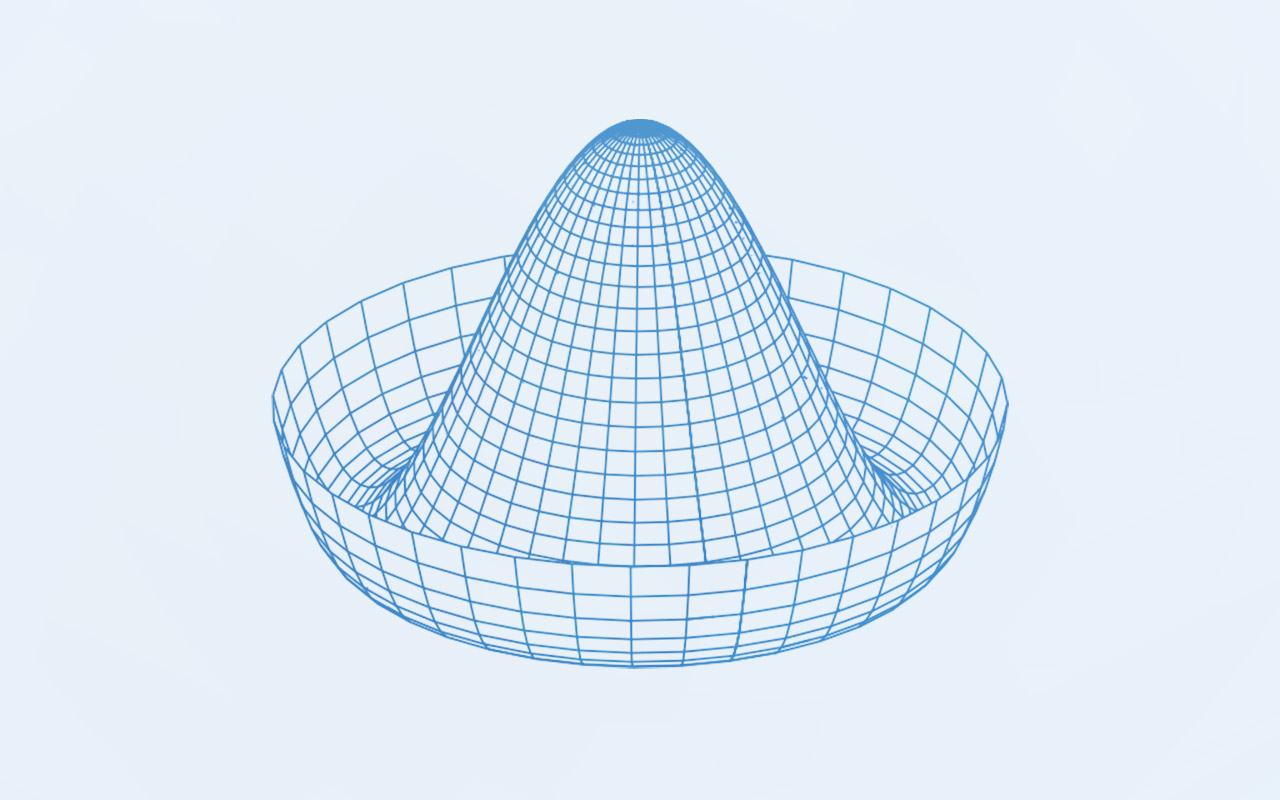
Haga clic sobre el enlace para ver los ejemplos del teorema 4.
|
|
Haga clic aquí para ver un ejemplo de la forma en que se calcula el volumen de un cono usando arandelas o capas. |

Longitud de un arco y superficies de revolución
Con base en el área de una región plana y continuando con las aplicaciones de las integrales se puede presentar la necesidad de calcular la longitud de un arco o el área de una superficie de revolución.
Para tales fines procederemos a explicar los teoremas 5 y 6. Mientras el teorema 5 indica la ecuación para calcular la longitud de un arco, el teorema 6 indica la ecuación para calcular superficies de revolución con base en los arcos.
Lo anterior es posible gracias a que la longitud de un arco permite determinar, con un alto grado de precisión, la longitud de secciones de círculos o circunferencias, así como otros tipos de curvas. De igual manera, permite calcular la superficie de determinadas figuras tanto regulares como irregulares.

Longitud de un arco y superficies de revolución
Longitud de un arco
La integral puede utilizarse para calcular la longitud del arco de curvas planas. Este proceso se realiza aproximando las curvas por segmentos de rectas cuya longitud está dada por la fórmula de distancia, la cual es:

Teorema 5. Definición de longitud de un arco
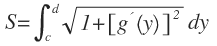
Si la gráfica de y=f(x) en el intervalo [a, b] es una curva suave, entonces la longitud del arco de f entre a y b es:

Entonces podemos decir que S es la longitud del arco de f(x) entre a y b.
Análogamente, para una curva dada por x=g(y), la longitud del arco entre c y d es:
Haga clic aquí para ver dos ejemplos en los que se aplica el teorema 5.
 |
Para recordar... Una curva se llama rectificable si tiene longitud finita. |
Longitud de un arco y superficies de revolución
Superficies de revolución
Si se hace girar la gráfica de una función continua en torno a una recta, la superficie resultante se llamará superficie de revolución. Para calcular el área de dicha superficie de revolución se procede de acuerdo con el radio medio de la superficie y los radios extremos de giro, tal como se muestra en el siguiente teorema:
Teorema 6. Definición del área de una superficie de revolución
Sea y=f(x) una función continua en el intervalo [a, b]. El área AS de la superficie de revolución generada al girar o rotar la gráfica de la función f en torno a un eje horizontal o vertical es:

Sea y en función de x el eje de revolución donde r(x) denota la distancia entre la gráfica de f y el eje de revolución. Si x=g(y) es continua en el intervalo [c, d], entonces el área de la superficie generada es:

x en función de y donde r(y) denota la distancia entre la gráfica de g y el eje de revolución.
Haga clic sobre el enlace para ver un ejemplo del teorema 6.
Actividad de aprendizaje
|
|
El siguiente videotest le permitirá hallar el área de una superficie en revolución. |
Centro de masa y teorema de Pappus
La aplicación de integrales en el cálculo de la masa de un objeto resulta importante, puesto que en muchas ocasiones se hace necesario determinar momentos y puntos de equilibrio. Pero antes de profundizar en este tema, haga clic sobre el enlace para conocer la definición de los conceptos que usaremos a continuación.
Teorema 7. Momentos y centro de masa: sistema unidimensional
Sea un sistema de masas puntuales m1, m2…, mn localizadas en x1, x2…, xn, entonces:
- El momento respecto al origen es: M0=m1x1+m2x2+...+mnxn.
-
El centro de masa es:
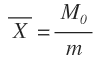
Donde: m=m1+m2+...+mn es la masa total del sistema.
Haga clic sobre el enlace para ver un ejemplo de la aplicación del teorema 7.

Centro de masa y teorema de Pappus
Centro de masa de un sistema bidimensional
Para este proceso consideremos masas en un plano xy, localizadas en los puntos (x1, y1), (x2, y2)..., (xn, yn), como se muestra en la figura 1.
Teorema 8. Momentos y centro de masa: sistema bidimensional
Considere un sistema de masas puntuales m1, m2..., mn, localizadas en los puntos (x1, y1), (x2, y2)..., (xn, yn).
-
El momento respecto al eje y es: My = m1x1 + m2x2 + ... + mnxn.
-
El momento respecto al eje x es: Mx = m1y1 + m2y2 + ... + mnyn.
-
El centro de masa en xy es: (x̄ + ȳ)
Donde m=m1+m2+...+mn es la masa total del sistema.
Para calcular el centro de masa respecto de cualquier recta, se consideran las distancias dirigidas de los puntos a la recta con el debido desplazamiento, de tal manera que si la recta horizontal está en y=b y la recta vertical está en x=a, tenemos:
- Momento = m1(y1 - b) + m2(y2 - b) + ... + mn(yn - b) para recta horizontal.
- Momento = m1(x1 - a) + m2(x2 - a) + ... + mn(xn - a) para recta vertical.
Haga clic sobre el enlace para ver un ejemplo en el que se aplican estos conceptos.

Centro de masa y teorema de Pappus
Centro de masa de una lámina plana
Este concepto lo usamos cuando hablamos de una lámina de densidad constante y distribuida, donde la masa total es la suma de las masas distribuidas.
Para láminas planas, la densidad es una medida de masa. Consideremos una lámina plana de densidad uniforme ρ, acotada por las gráficas y=f(x), y=g(x), y a ≤ x ≤ b, entonces la masa de la región esta dada por:
| Masa | = | densidad * área |
| Masa | = |
 |
| Momento | = | masa * distancia |
Para calcular el centro de masa de una lámina plana, veamos el teorema 9.
Centro de masa y teorema de Pappus
El teorema de Pappus
El teorema de Pappus es una aplicación especial de las integrales que se usa para calcular áreas y volúmenes de figuras o secciones geométricas regulares.
Este teorema es un proceso de trabajo con integrales para figuras de carácter geométrico que puede evitar un sinnúmero de cálculos para llegar a una respuesta correcta.
Teorema 10. Teorema de Pappus
Sea R una región en el plano y L una recta de ese plano que no corta el interior de R. Si r denota la distancia del centroide de R a la recta L, el volumen del sólido de revolución generado al hacer girar la región R en torno a la recta L es V=2πrA
Donde A es el área de R.
Haga clic sobre el enlace para ver un ejemplo que demuestra la aplicación del teorema de Pappus.
|
|
Haga clic para ver un ejercicio en el que se aplica el teorema de Pappus. |

Resumen
Las diversas aplicaciones de la integral definida son una forma de ver cómo la ingeniería y otras áreas del saber necesitan a las ciencias básicas para desarrollar sus procesos en diversos campos teóricos y aplicados. Aunque en esta unidad solo abordamos algunas de las aplicaciones más relevantes, no quiere decir que sean las únicas o las más importantes entre las aplicaciones de la integral, la cual también permite calcular procesos económicos y administrativos.
El cálculo de áreas, volúmenes, centros de masa y superficies le permitirá al futuro profesional diseñar y desarrollar diversos sistemas que faciliten tanto el control de procesos como la gestión de los mismos al interior de las industrias; diseñar maquinaria o espacios físicos como construcciones, y hacer proyecciones y cálculos geométricos para cualquier otro campo de aplicación.


Bibliografía ()
- Andrade, A. (2004). Cálculo Diferencial e Integral. México, Limusa.
- Bombal, F., Rodríguez, l., y Vera, G. (1987). Problemas de análisis matemático 3. Madrid, España: Alfa Centauro.
- Bugrov, Y., y Nikolski, S. (1984). Matemáticas superiores. Cálculo diferencial e integral. Moscú, Unión Soviética: Mir.
- Cerdà Martín, J. (2001). Càlculo integral. Barcelona, España: Edicions de la Universitat de Barcelona.
- Conde Sánchez, C. (1991). Cálculo integral vectorial. 2.ª ed. Madrid, España: Tébar Flores.
- Coquillat, F. (1980). Cálculo Integral. Metodología y Problemas. Madrid, España: Tébar Flores.
- Dávila, E. (s. f.). Reglas básicas de la integración.
- Díaz, J. (1991). Cálculo Integral. Integrales y Series. Madrid, España: Tébar Flores.
- Goldstein, L., Lay, D., y Schneider, D. (1992). Calculus and Its applications. 6.ª ed. EUA: Prentice Hall International.
- Larson, R., Hostetler, R., y Edwards, B. (2006). Cálculo con geometría analítica. 8.ª ed. México: McGraw-Hill.
- Leithold, L. (1998). El Cálculo. 7.ª ed. Oxford University Press.
- Nielsen, O. (1997). An introduction to integration and measure theory. EUA: John Wiley & Sons.
- Piskunov, N. (1983). Cálculo diferencial e integral. 2.º vol. Moscú, Unión Soviética: Mir.
- Purcell, E., Varberg, D., y Rigdon, S. (2007). Cálculo. 9.ª ed. México: Pearson.
- Spiegel, M. (2001). Cálculo Superior. México: McGraw-Hill.
- Stewart, J. (2001). Cálculo de una variable: transcendentes tempranas. 4.ª ed. España: Thomson.
- Stewart, J., Redlin, L., y Watson, S. (2006), Precálculo. 6.ª ed. Cengage Learning.
- Stewart, J. (2008). Cálculo de una variable. 6.ª ed. México: Cengage Learning.
- Swokowski, E., Olinick, M., y Pence, D. (1994) Calculus, EUA: PWS Publishing Company.
- Tébar Flores, E., y Tébar Less, M. A. (2002). 909 Problemas de Cálculo Integral. Tomo I. Albacete, España: Tébar Flores.
- Tébar Flores, E., y Tébar Less, M. A. (2003). 909 Problemas de Cálculo Integral. Tomo II. Albacete, España: Tébar Flores.
- Thomas, G. (1998). Cálculo Varias Variables. México: Pearson Addison Wesley.
- Thomas, G., y Finney, R. (2005). Cálculo Una Variable. 10.ª ed. México: Pearson Educación.
- Thomas, G. (2010). Cálculo Una Variable. 12.ª ed. México Pearson Educación.
Referencias Web
- Albornoz, J. (s. f.). Área de una región plana. Recuperado de: https://goo.gl/hFyAto
- Alfonzo, C. (s. f.). Sucesiones y series. Recuperado de: https://goo.gl/4k6evh
- Averater. (2012). Cone with height radii and side. [Gráfico]. Recuperado de:https://goo.gl/iBpF8t
- Biografías y vidas. (s. f.). Brook Taylor. Recuperado de: https://goo.gl/FPUE6u
- Biografías y vidas. (s. f.). Colin Maclaurin. Recuperado de: https://goo.gl/iaAuqp
- Biografías y vidas. (s. f.). Isaac Newton. Recuperado de: https://goo.gl/9dwriW
- Biografías y vidas. (s. f.). Pitágoras. Recuperado de: https://goo.gl/MnsdJw
- Calculo.cc. Ejercicios resueltos de integrales trigonométricas. Recuperado de: https://goo.gl/kXRXMa
- Cifuentes, N. (s. f.). Integración por fracciones parciales. Recuperado de: https://goo.gl/mciQe2
- Derbyshire, D. (2006). TaylorCosPol. [Imagen]. Recuperado de: https://goo.gl/jLXtJM
- Elchayo. (s. f.) Capítulo 4: el teorema fundamental del cálculo. Recuperado de: https://goo.gl/J3NsTE
- Escuela Politécnica Nacional. (2012). Dos tipos de integrales. Recuperado de: https://goo.gl/XoeN5n
- García, E. (2007). Integrales indefinidas. Recuperado de: https://goo.gl/SnVc2Z
- Guijón, I. (2009). Integral definida. Cálculo de áreas. Recuperado de: https://goo.gl/zTn8Zv
- Harding, E. (1798). Colin Maclaurin. [Grabado]. Recuperado de: https://goo.gl/Snjdy7
- Ingeniería Electrónica.org. (S. f.). Definición Función Primitiva. Tomado de: https://goo.gl/6fTxXS
- JohnManuel. (2007). Función de Trigonometría. [Gráfico]. Recuperado de: https://goo.gl/VAHy7N
- Laurence HR. (2008). Teoremas fundamentales del cálculo. Recuperado de: https://goo.gl/yafJRY
- Lely, P. (1799). Portrait of Isaac Newton. [Grabado]. Recuperado de: https://goo.gl/Wcgt7Z
- Peña, C. (2008). Antiderivada. Recuperado de: https://goo.gl/EE3HQS
- Ríos, J. (2017). Integrales trigonométricas. Recuperado de: http://julioprofe.net
- Rodríguez, L. (26 de noviembre de 2014). Área de una superficie de revolución - Ejemplo. [Archivo de video]. Recuperado de:https://youtu.be/K7puFcosPLI
- S. n. (s. f.). Image of Brook Taylor. [Imagen]. Recuperado de: https://goo.gl/3VSBRq
- S. n. (1863). Georg Friedrich Bernhard Riemann. [Imagen]. Recuperado de: https://goo.gl/Ws1S6v
- S. n. (S. f). Paul Guldin. [Grabado]. Recuperado de: https://goo.gl/hqdrCU
- Szilas. (2013). Pythagoras in the Roman Forum. [Fotografía]. Recuperado de: https://goo.gl/MRAs7W
- Universidad Antonio Nariño. (s. f.). Guía 1: antiderivadas. Recuperado de: https://goo.gl/1gFWjJ
- Universidad de Chile. (s. f.) Teorema Fundamental del Cálculo. Recuperado de: https://goo.gl/6EaXgY
- Universidad Industrial de Santander. (s. f.). Sumas de Riemann. Recuperado de: https://goo.gl/mqw7Up
- Universidad Nacional del Litoral. (S. f.). Ejercicios. Recuperado de: https://goo.gl/4zfa7P
- Universidad Nacional del Litoral. (S. f.). Hacia el teorema fundamental del cálculo. Recuperado de: https://goo.gl/USnqgX
- Universidad Nacional del Litoral. (S. f.). La integral definida. Recuperado de: https://goo.gl/5ZWCyN
- Universidad Nacional del Litoral. (S. f.). Propiedades y teoremas de la integral definida. Recuperado de: https://goo.gl/Jb2dlJ
- Universidad Nacional del Litoral. (S. f.). Situaciones que se pueden plantear en el cálculo de áreas de regiones planas. Recuperado de: https://goo.gl/4zfa7P
- Sectormatemática.cl. (s. f.). Sucesiones acotadas. Recuperado de: https://goo.gl/MmfLMq