
Introducción
Esta unidad introduce al estudiante en el análisis de sistemas y la forma de obtener, por medio de la serie o la transformada de Fourier, el espectro de una señal dada para el análisis del contenido frecuencial. Se desarrollan conceptos fundamentales de sistemas en tiempo continuo y en tiempo discreto. Se definen el concepto Fourier (series trigonométricas, serie compleja y transformada de Fourier en tiempo continuo y tiempo discreto), así como el enfoque de sus aplicaciones en ingeniería.
Adicionalmente, se realizan diferentes ejemplos, los cuales son de autoría propia y de otros libros como Procesamiento de señales analógicas y digitales (Ambardar, 2002) y Señales y Sistemas (Morón, 2011).
Al final de la unidad, se proponen ejemplos de apoyo, utilizando el software MATLAB, el cual es una herramienta informática de gran utilidad para modelos, simulación y desarrollo matemático en el ámbito de la ingeniería.

En esta unidad podrá tener un acercamiento al análisis de sistemas, concepto Fourier y el enfoque de sus aplicaciones en ingeniería.
Propósitos de aprendizaje
Propósito general
Implementar los diferentes métodos matemáticos de Fourier para la interpretación de modelos y aplicaciones que involucran el análisis de sistemas por medio de señales en tiempo continuo y en tiempo discreto.
Propósitos específicos
- Entender el concepto de sistemas y sus diferencias en tiempo continuo y en tiempo discreto.
- Desarrollar métodos y desarrollos matemáticos de Fourier para el análisis de señales en tiempo continuo y en tiempo discreto.
- Analizar los métodos empleados por medio de Fourier (series, transformada) en el dominio del tiempo y la frecuencia.
- Representar gráficamente los diferentes métodos matemáticos de Fourier para el análisis de resultados en el domino del tiempo y de la frecuencia.

Sistemas
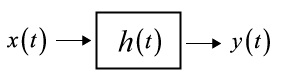
Son definidos como la representación en el comportamiento de modelos físicos, eléctricos, mecánicos etc. Se analizan por medio de su comportamiento, a través de señales, las cuales muestran sus características en el dominio del tiempo. El principal objetivo de un sistema es analizar el comportamiento y cómo afectan las señales de entrada a las señales de salida en la representación del domino del tiempo o en tiempo discreto.
Estas representaciones se diferencian por el dominio de trabajo que tienen. Por ejemplo, usualmente los modelos representados por convolución son trabajados en el domino del tiempo y la representación basada en funciones de transferencia en el domino de la frecuencia. En esta unidad trataremos el análisis de sistemas en tiempo continuo y en tiempo discreto, con parámetros representados solo de entrada/salida.

Recuerda que los sistemas e analizan por medio de su comportamiento, a través de señales, las cuales muestran sus características en el dominio del tiempo.
Sistemas
Sistemas analógicos
Son utilizados para el procesamiento de señales análogas. En capítulos anteriores, definíamos que todos los sistemas análogos son conocidos de esta manera, puesto que sus señales son continuas en el dominio del tiempo.
Los sistemas análogos son conocidos como sistemas continuos y su representación depende de las perturbaciones o cambios que tiene su salida como respuesta con respecto a su entrada; pueden ser clasificados en tiempo continuo como sistemas lineales y sistemas no lineales. Un sistema LTI lineal invariante en el tiempo es aquel sistema que cumple con la propiedad de superposición; cuando un sistema no cumple con el principio de superposición se dice que el sistema es no lineal.
Los sistemas lineales son muy utilizados, ya que permiten descomponer una señal, trabajar con sus características y, posteriormente, sumar todas las respuestas generadas para obtener la respuesta generalizada de cualquier sistema.
 |
Los sistemas lineales invariantes en el tiempo continuo son descritos por medio de ecuaciones diferenciales con coeficientes constantes y deben cumplir con la propiedad de superposición. {{a}_{n}}\frac{{{d}^{n}}x\left( t \right)}{d{{t}^{n}}}+{{a}_{n-1}}\frac{{{d}^{n-1}}x\left( t \right)}{d{{t}^{n-1}}}+\ldots \ldots +{{a}_{0}}x\left( t \right)~\text{ }= |
Los sistemas análogos pueden ser clasificados como sistemas lineales y sistemas no lineales.
Sistemas
Sistemas en tiempo discreto
Los sistemas empleados para procesamiento de señales en discreto determinan filtros digitales, basados en funciones específicas, de acuerdo con el comportamiento de la entrada y la salida.
Para los parámetros definidos de entrada, el principio de superposición se define como:
x[n] = a1 x1 [n] + a2 x2 [n] + a3 x3 [n] + a4 x4 [n]……..
Esta ecuación muestra, dentro de esta definición, una combinación lineal de señales de entrada que excitan los parámetros del sistema a la salida, obteniendo:
y[n] = a1 y1 [n] + a2 y2 [n] + a3 y3 [n] + a4 y4 [n]…….
Los sistemas discretos son muy utilizados en el análisis y el procesamiento de señales digitales.
 |
Se debe tener presente que los sistemas lineales invariantes en el tiempo discreto son descritos por medio de ecuaciones en diferencias y deben cumplir con la propiedad de superposición. a0 y [n] + a1 y [n-1] + a2 y [n-2] + a3 y [n-3] + ………..….. + aN y [n-N] = x[n] |

Recuerda que los sistemas discretos también cumplen con el principio de superposición.
Sistemas
Convolución continua
Para hablar de convolución en tiempo continuo se debe tener presente la respuesta que genera un sistema a la señal impulso aplicada a su entrada.
Para realizar la convolución de dos señales se deben tener presente las propiedades y el desplazamiento originado por medio de la función, para así generar una aproximación o predicción del comportamiento por medio de un parámetro gráfico.
Por definición:
 |
Le invitamos a revisar un ejemplo sobre convolución continua. |

Recuerda que con el fin de ser más precisos, la convolución determina el comportamiento de la salida del sistema por medio del conocimiento dado en la entrada y la respuesta al impulso del sistema.
Sistemas
Convolución discreta
La convolución en tiempo discreto se realiza como método alterno para encontrar la respuesta en sistemas invariantes en el tiempo LTI. Se considera la información del sistema, de acuerdo con su respuesta ante un impulso.
Por definición:
Con el fin de proporcionar un concepto sencillo y facilitar el entendimiento, trabajaremos bajo el concepto de la convolución por el método de suma por columnas. Para emplear este método, se debe seguir este procedimiento:
- Alinear la secuencia de con x[n] con h[n].
- Realizar el producto de cada una de las muestras alineadas.
- Realizar la respectiva suma para generar la secuencia de convolución.
 |
Le invitamos a revisar este ejemplo relacionado con convolución discreta. |

Recuerda que la convolución en tiempo discreto se realiza como método alterno para encontrar la respuesta en sistemas invariantes en el tiempo LTI.
Introducción a Fourier y generalidades
Las series de Fourier son llamadas así en honor al físico francés Jean Baptiste Fourier (1768-1830), quien fue el primer en proponer que las ondas de forma periódica podían representarse mediante la suma de ondas sinusoidales (exponenciales complejas) (Kamen, 2008)
Las series de Fourier o series trigonométricas de Fourier determinan el análisis de señales periódicas, en la descomposición fundamental, por medio de la sumatoria de funciones seno y coseno.
Muchos de sus enfoques se relacionan con sistemas oscilantes los cuales se aplican en diferentes áreas como electrónica e informática, para el análisis de señales, en telecomunicaciones, tratamiento de imágenes, etc. Para representar estas series es necesario definir su espectro en términos de magnitud y fase, con el fin de lograr un mejor entendimiento del comportamiento a nivel frecuencial de los sistemas.
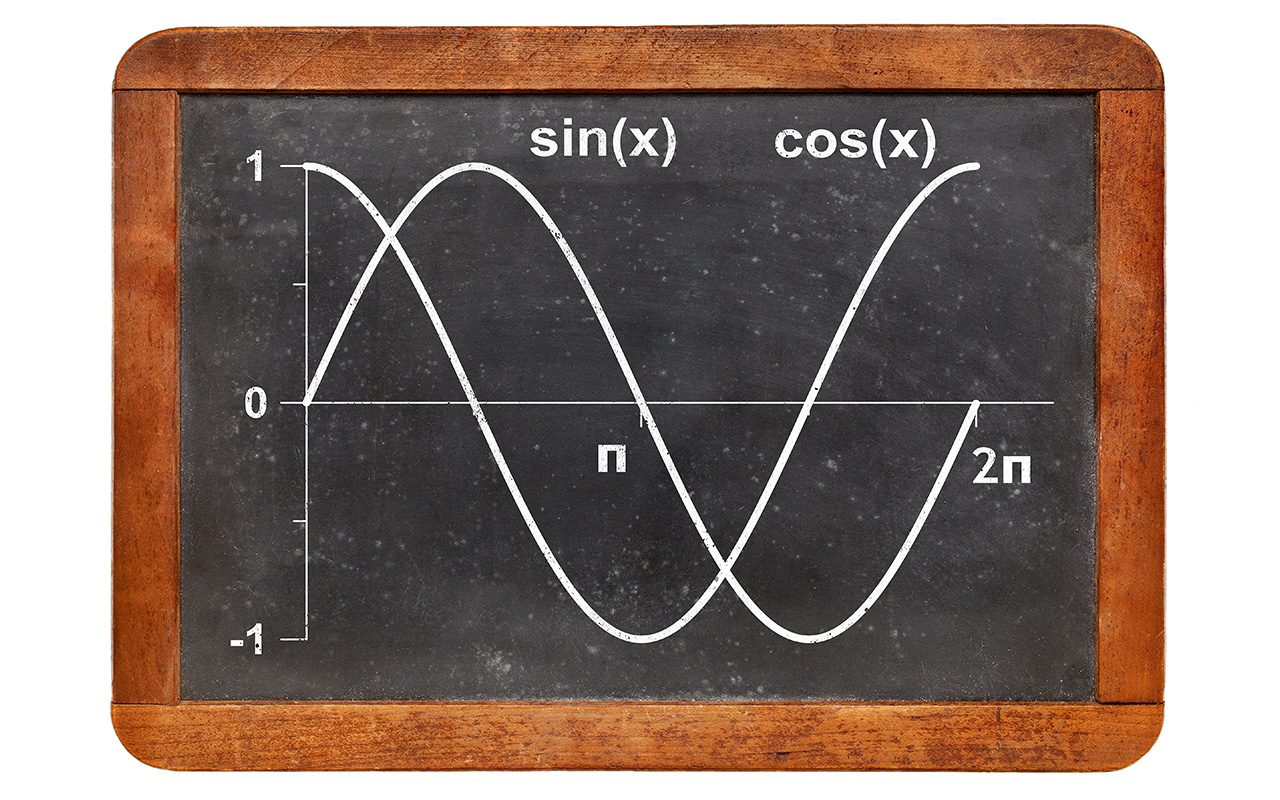
El físico francés Jean Baptiste Fourier fue quien propuso, por primera vez, que las ondas de forma periódica podían representarse mediante la suma de ondas sinusoidales.
Introducción a Fourier y generalidades
Serie trigonométrica de Fourier
La serie trigonométrica de Fourier es definida como:
Dada la función f(t) una función periódica, es decir ft=f(t±T), donde t es el periodo, f(t) puede ser expresada como:
Esta serie se conoce como la serie trigonométrica de Fourier.
Para definir los coeficientes de Fourier se hace uso de las relaciones de ortogonalidad de la familia de funciones sinusoidales.
 |
Le invitamos a ver video en pantalla de la aplicación del concepto de la serie de Fourier en un sistema eléctrico y a revisar un ejemplo relacionado con serie trigonométrica de Fourier. |
Introducción a Fourier y generalidades
Serie exponencial de Fourier
Es común que para algunas aplicaciones sea conveniente expresar las series en términos de los exponenciales complejos e±jnω0t.
|
|
Con el fin de encontrar la serie compleja de una señal diente de sierra, le invitamos a revisar el siguiente ejemplo. |
Espectro de frecuencia compleja
Los diferentes tipos de información como video, voz y datos pueden ser representados por medio de señales electromagnéticas; estas señales, a su vez, se encuentran conformadas por una serie de características con base en la amplitud, la fase y la frecuencia. Los espectros de frecuencia son representaciones gráficas de las ondas que determinan ciertas aplicaciones, de acuerdo con su comportamiento, con base en la frecuencia (Rossman, 2014).
 |
Le invitamos a revisar un ejemplo relacionado con espectros de frecuencia. |
Integral de Fourier y espectros continuos
Las series de Fourier (trigonométrica y compleja) son poderosas herramientas para el estudio de funciones periódicas; sin embargo, no nos prestan utilidad alguna para aquellas funciones no periódicas.

Recuerda que la señal diente de sierra es muy aplicada en el principio y diseño de fuentes de conmutación.
Transformada de Fourier
La transformada de Fourier nace de la iniciativa de buscar el análisis de señales sin un periodo definido. Las componentes no periódicas están definidas para todos los valores reales de la variable de frecuencia definida como ω. Consulta aquí su definición.
 |
Le invitamos a revisar estos ejemplos sobre la transformada de Fourier. |
Transformada de la función seno y coseno
Si f (t) está definida solo para 0< t < ∞ la transformada coseno de Fourier:
{{F}_{c}}\left( \omega \right)={{\mathfrak{F}}_{c}}\left[ f\left( t \right) \right]=\text{ }\!\!~\!\!\text{ }\underset{0}{\overset{\infty }{\mathop \int }}\,f\left( t \right)Cos\text{ }\!\!~\!\!\text{ }\omega t\text{ }\!\!~\!\!\text{ }dt
y la transformada de Fourier inversa coseno correspondería a:
Si f (t) está definida sólo para 0<t<∞ la transformada seno de Fourier:
{{F}_{s}}\left( \omega \right)={{\mathfrak{F}}_{s}}\left[ f\left( t \right) \right]=\text{ }\!\!~\!\!\text{ }\underset{0}{\overset{\infty }{\mathop \int }}\,f\left( t \right)\text{ }\!\!~\!\!\text{ }Sen\text{ }\!\!~\!\!\text{ }\omega t\text{ }\!\!~\!\!\text{ }dt
y la transformada de Fourier inversa seno correspondería a:
 |
Le invitamos a revisar un ejemplo relacionado con la transformada de la función seno y coseno. |

Recuerda que la transformada de Fourier tiene propiedades algebraicas cuando se aplica a las características de una señal.
Transformada de Fourier
Análisis de Fourier en tiempo continuo
Como toda señal representada por medio de una función, es posible aplicar parámetros de corrimientos, desplazamientos, simetría, etc. Estas propiedades se definirán de la siguiente manera:
Corrimiento del tiempo: \mathfrak{F}\left[ f\left( t-{{t}_{0}} \right) \right]={{e}^{-j\omega {{t}_{0}}}}F\left( \omega \right)
La versión de la transformada inversa del teorema del corrimiento del tiempo es: {{\mathfrak{F}}^{-1}}\left[ {{e}^{-j\omega {{t}_{0}}}}F\left( \omega \right) \right]=f\left( t-{{t}_{0}} \right)
 |
Le invitamos a revisar estos ejemplos sobre el análisis de Fourier en tiempo continuo. |
Convolución
Sean f y g funciones definidas en la recta real, se dice que f tiene una convolución con g si cumple que:
- \underset{a}{\overset{b}{\mathop \int }}\,f\left( t \right)dt\text{ }\!\!~\!\!\text{ }y\text{ }\!\!~\!\!\text{ }\underset{a}{\overset{b}{\mathop \int }}\,g\left( t \right)dt existen para todo intervalo [a,b].
-
Para todo real \underset{-\infty }{\overset{\infty }{\mathop \int }}\,\left| f\left( t-\tau \right)g\left( \tau \right) \right|d\tau converge. En este caso la convolución f*g se define como:
f\text{*}g=\underset{-\infty }{\overset{\infty }{\mathop \int }}\,f\left( t-\tau \right)g\left( \tau \right)d\tau
La convolución es conmutativa, esto implica que f*g=g*f.
- Convolución en el tiempo: \mathfrak{F}\left[ f*g \right]=F\left( \omega \right).G\left( \omega \right)
- Convolución en la frecuencia: \text{ }\!\!~\!\!\text{ }\mathfrak{F}\left[ f.g \right]=\frac{1}{2\pi }F\left( \omega \right)*G\left( \omega \right)
 |
Le invitamos a revisar este ejemplo sobre convolución. |

Recuerda que como toda señal representada por medio de una función, es posible aplicar parámetros de corrimientos, desplazamientos, simetría, etc.
Transformada de Fourier
Análisis de Fourier en tiempo discreto
Sea N un entero positivo. Sea u=\left\{ {{u}_{j}} \right\}\begin{matrix} N-1 \\ j=0 \\ \end{matrix} una sucesión de N números complejos. Entonces la N transformada discreta de Fourier de N puntos de u es la sucesión \mathbb{D}\left[ u \right] definida por: \mathbb{D}\left[ u \right]\left( k \right)={{U}_{k}}=\underset{j=0}{\overset{N-1}{\mathop \sum }}\,{{u}_{j}}{{e}^{{}^{-2\pi ijk}/{}_{N}}}.
Para k=0,±1,±2,…
 |
Le invitamos a revisar estos ejemplos relacionados con el análisis de Fourier en tiempo discreto. |
La TDF inversa de N puntos
Supongamos que tenemos una TDF de N puntos
De una sucesión u=\left\{ {{u}_{j}} \right\}\begin{matrix} N-1 \\ j=0 \\ \end{matrix}\text{ }\!\!~\!\!\text{ } de N números. Afirmamos que:
{{u}_{j}}=\frac{1}{N}\underset{k=0}{\overset{N-1}{\mathop \sum }}\,{{U}_{k}}{{e}^{\frac{2\pi ijk}{N}}} Para j=01,2,3\ldots N-1
 |
Como apoyo para estos contenidos, se propone una serie de ejercicios utilizando una herramienta informática que permite fortalecer los conceptos vistos. Para su desarrollo, se debe tener en cuenta el material recomendado y los enlaces que se generan de la ayuda por defecto en MATLAB. Se utiliza el programa MATLAB y OCTAVE ONLINE, los cuales permiten simular los códigos de línea y los comandos, al igual que lo hace el entorno de command window de MATLAB. Le invitamos a revisar este ejemplo sobre aplicaciones en MATLAB. |
Actividad de aprendizaje
 |
Le invitamos a realizar la siguiente actividad relacionada con construcción y análisis de armónicos. |

Recuerda que MATLAB y OCTAVE ONLINE permiten simular los códigos de línea y los comandos, al igual que lo hace el entorno de command window de MATLAB.
Resumen
En esta unidad se analizan los sistemas en tiempo continuo y tiempo discreto, relacionando algunas de las propiedades más aplicadas para el análisis de señales. Con base en las señales, se resalta la convolución de señales continuas y discretas, la cual es de gran importancia en diferentes áreas de ingeniería.
Se aborda la convolución continua y la convolución discreta. Adicionalmente se realiza el análisis de señales periódicas. Se realiza el análisis de las señales no periódicas abordando el concepto de la transformada de Fourier en tiempo continuo y discreto.
 |
Con el fin de entender cada uno de los conceptos y representaciones de las señales y sistemas definidos en esta unidad, se finaliza con el desarrollo de ejemplos utilizando herramientas informáticas en este caso MATLAB, que permiten calcular, graficar y analizar las señales en el ámbito de la ingeniería. |
Actividad de aprendizaje
|
|
Le invitamos a realizar la siguiente actividad relacionada con sistemas y análisis de Fourier. |


Bibliografía ()
- Ambardar, A. (2002I. Procesamiento de señales analógicas y digitales. Thomson Learning.
- Gerometta, O. (2011). Mis libreo Networking.
- Haykin, S. y Van Veen, B. (2001). Señales y sistemas. Ed.Limusa-Wiley.
- Hwei, H. (2012). Señales y sistemas. Serie Schaum. McGraw-Hill.
- Kamen, E. y Heck, S. Fundamentos de señales y sistemas usando la web y Matlab, 3ra Edición.
- Morón, J. (2011). Señales y sistemas. Vereda del Lago, Maracaibo. Venezuela: Universidad Rafael Urdaneta.
- Oppenheim, A; Willsky, A. y Nawab, H. (1996). Señales y sistemas. Pearson Educación.
- Soliman, S. y Mandyan, S. (1999). Señales y sistemas continuos y discretos. México: Prentice Hall.
Referencias Web
- Rossman, R. (2014). El espectron de frecuencia y sus aplicaciones. Cultura Ciencia y Tecnologia. Recuperado de: http://asdopen.unmsm.edu.pe/files/Revista6-1.pdf.