
Introducción
En esta unidad estudiaremos la trasformada de Laplace 𝓛 que, entre otras cosas, permite por ejemplo transformar una ecuación diferencial ordinaria lineal con coeficientes constantes,
ay´´+ by´+ cy = f (x)
y condiciones iniciales y (0) = y0 y y´(0) = y1, en una ecuación algebraica dada por:
aF1 + bF2 + cF3 = F4

en la que F1, F2, F3 y F4 son funciones reales que no involucran derivadas.
Propósitos de aprendizaje
Propósito General
Estudiar la transformada de Laplace como un caso particular de los operadores lineales en el espacio de funciones, y utilizar algunas de sus propiedades para solucionar ecuaciones diferenciales ordinarias lineales con condiciones iniciales.
Propósitos Específicos
- Definir la trasformada de Laplace como un operador lineal en el espacio de funciones reales e identificar su utilidad para encontrar la solución de ecuaciones diferenciales ordinarias lineales.
- Estudiar la transformada de Laplace, la transformada inversa asociada y las propiedades necesarias para solucionar algunas ecuaciones diferenciales empleando tales operadores.

Operadores lineales
Para tratar adecuadamente el concepto de transformada de Laplace es conveniente comprender que esta transformada es un caso particular de los llamados operadores funcionales, que informalmente hablando son funciones cuya tarea principal es, en nuestro contexto, tomar una función real y generar como resultado otra función real.
Sin embargo, dado que cada operador requiere de ciertas condiciones para su correcta definición, necesitamos establecer qué características debe tener tal conjunto de funciones y para ello recurrimos a herramientas tanto de álgebra lineal como de análisis real.
 |
Para comprender mejor lo anteriormente dicho, analicemos el siguiente ejemplo de operadores lineales. |

Operadores lineales
Operadores integrales
Aunque existen muchos tipos de operadores lineales, hay una clase muy importante y utilizada en análisis que se denomina operadores integrales. Específicamente, un operador integral es aquel que a una función dada f(x) (en un espacio vectorial determinado) le asigna la transformación:

Donde G (s,x) es una función de control (o peso) llamada usualmente núcleo, a y b pertenecen al conjunto ℝ U {±∞} y F[f](s) es una función en variable s que se denomina la transformada de f.

Transformada de Laplace
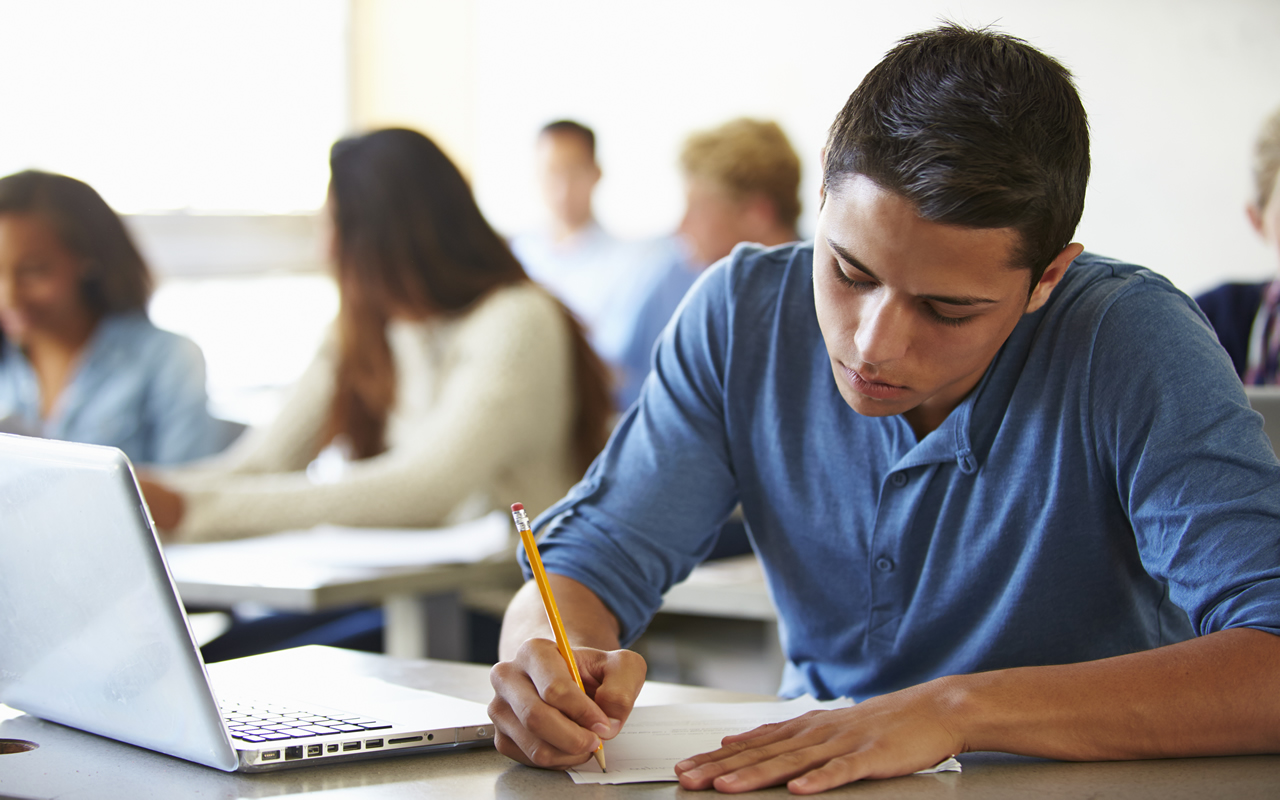
Entre los operadores integrales, una clase muy utilizada es aquella donde el núcleo involucra la función exponencial. Particularmente, y entre otras cosas, debido al comportamiento exponencial de las soluciones de una ecuación diferencial lineal se define la transformada de Laplace de una función f (t) definida en el intervalo [0, ∞] como
donde el núcleo está dado por G (s,t) = e-st. Sin lugar a confusión, y para simplificar notación denotaremos por ℒ [f] a la transformada de Laplace de f.
Como dependiendo de la función f esta integral puede ser convergente o divergente, se hace necesario establecer para qué funciones tal límite es convergente. En este sentido, tenemos que contemplar dos aspectos: función continua por trozos y función dominada por una exponencial. Del primero de éstos, y de acuerdo a su definición, comprendamos el siguiente ejemplo.
 |
Antes de continuar es conveniente mencionar que el conjunto de todas las funciones que satisface el teorema anterior es un subespacio vectorial de FR que podemos denotar por ∆, y que aunque en tal espacio no están todas las funciones cuya transformada de Laplace existe (conjunto que es difícil de caracterizar completamente), en este subespacio están la mayor parte de las funciones que usualmente trabajamos. Un buen ejercicio para el lector consiste en comprobar que ∆ si es un subespacio vectorial de FR y en dar algún ejemplo de una función que no esté en ∆ pero tal que su transformada de Laplace exista. |

Transformada de Laplace
Cálculo de transformadas de Laplace
Ya teniendo descrito un conjunto básico de funciones para las cuales existe la transformada de Laplace, la siguiente tarea consiste en calcular la transformada de algunas de estas funciones:
1. Sea f(t) = 1, con t ≥0. Entonces

2. Sea f(t) = t, con t ≥ 0. Entonces

Veamos el desarrollo de estas funciones en el videotutorial de esta pantalla.
Transformada de Laplace
Propiedades de la transformada de Laplace
Ahora bien, aunque podemos continuar calculando directamente la transformada de Laplace de algunas funciones, es conveniente utilizar propiedades para simplificar las cuentas, las cuales son:
- Propiedad de Linealidad
- Propiedades de Transformación
- Transformada de una Derivada
- Transformada de una Integral
A continuación se resume algunos de los resultados obtenidos.
Actividad de aprendizaje
 |
Relaciona las funciones f (t) y su correspondiente transformada de Laplace F (s) en esta actividad y así pon a prueba lo aprendido hasta el momento. |

Transformada de Laplace
Transformada inversa de Laplace: definición y cálculo
La última herramienta que necesitamos introducir para poder aplicar la transformada de Laplace a la solución de ecuaciones diferenciales es el cálculo de la transformada inversa.
Ahora bien, además de las propiedades de la transformada de Laplace, para calcular la transformada inversa de Laplace de una función contamos esencialmente con dos herramientas, las cuales se explican en el gráfico de esta pantalla.
Finalmente, un resultado útil para determinar si dada una función F(s), con dominio el conjunto de todos los números reales mayores que uno dado, existe una función f(t) continua por trozos y dominada por una función exponencial tal ℒ [f(t)]= F(s) que , es el Teorema de existencia de la transformada inversa. Estudiemos los siguientes ejemplos.
 |
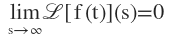
Teorema de existencia de la transformada inversa. Si f(t) es una función dominada por una función exponencial, entonces
Por ejemplo, Ya que
entonces no existe una función f(t) continua por trozos y dominada por una función exponencial tal que ℒ [f(t)]=cos(s). |


Transformada de Laplace
Convolución
El producto convolución o simplemente la convolución de dos funciones f y g, denotado por f * g es la función que se define como

Esta operación es relevante para nosotros en tanto nos brinda una forma alternativa de calcular la transformada inversa de Laplace de algunas funciones usando el famoso teorema de convolución.
Especificamente, el teorema de convolución permite calcular la transformada inversa de Laplace de un producto F(s)G(s) si se conoce la transformada inversa tanto de F(s) como de G(s).
 |
Teorema de convolución Si ℒ -1[F(s)]= f(t) y ℒ -1 [G(s)] = g(t), entonces
|


Aplicación de la transformada de Laplace a la solución de ecuaciones diferenciales
En esta sección emplearemos la transformada de Laplace y la transformada inversa de Laplace para solucionar ecuaciones diferenciales ordinarias lineales con coeficientes constantes y condiciones de iniciales.
A continuación presentamos otro ejemplo de la utilización de la Transformada de Laplace y la Inversa para solucionar una ecuación diferencial.
Caso de Estudio
Retoma lo trabajado en el apartado de convolución y realiza la siguiente actividad.
 |
Material |

Resumen
En esta unidad presentamos el operador lineal conocido como la transformada de Laplace, estudiamos algunas de sus propiedades y en particular enfatizamos en su uso para solucionar ecuaciones diferenciales ordinarias lineales con condiciones iniciales.
Específicamente, la presentación desarrollada incluyó tres grandes secciones. En la primera definimos lo que son operadores en el espacio de funciones y caracterizamos los operadores lineales.
En la segunda sección definimos la transformada de Laplace como un operador lineal entre espacios de funciones específicos y mostramos algunas propiedades y teoremas útiles para calcular la transformada de Laplace de algunas funciones, de sus derivadas e integrales. En la última parte, definimos la transformada inversa de Laplace y mostramos las técnicas usuales para calcularla, como por ejemplo el teorema de convolución.
Finalmente, en la última sección retomamos la teoría desarrollada en las dos primeras para resolver ecuaciones diferenciales ordinarias lineales con coeficientes constantes. Allí, enfatizamos en el proceso compuesto por tres pasos, los cuales se muestran en el gráfico principal de esta pantalla.


Bibliografía ()
- Blanchard, P. (1999) Ecuaciones Diferenciales. México: Thomson
- Bronson, R. (2005) Ecuaciones Diferenciales (3ra ed.). Mc Graw Hill.
- Kreider, D., Kuller, R. y Ostberg, D. (1973) Ecuaciones diferenciales. México: Fondo Educativo Interamericano, S. A.
- Kreyszig, E. (1991). Matemáticas avanzadas para ingeniería. México: Limusa.
- Nagle, R., Saff, E. and Snider, A. (2005). Ecuaciones diferenciales y problemas con valores en la frontera (4a. ed.). México, Distrito Federal: Pearson Educación.
- Penney, D. y Edwars, C.H. (1993) Ecuaciones diferenciales elementales. México: Editorial Prentice Hall.
- Simmons, G. (1993) Ecuaciones diferenciales con notas históricas. España: McGraw Hill.
- Zill, D. (2007). Ecuaciones diferenciales con aplicaciones de modelado. 9e. México, México: Cengage Learning Editores S.A. de C.V.
Referencias Web
- Dawkins, P. (2017). Differential equations – Notes. Recuperado de: http://tutorial.math.lamar.edu/Classes/DE/DE.aspx
- Miller, Haynes R., 1948-; Mattuck, Arthur. (2004). 18.03 Differential Equations, Spring 2004. Recuperado de: http://hdl.handle.net/1721.1/34888
- University of Canterbury. (S. F). 100-level Mathematics Revision Exercises. Recuerado de: http://www.math.canterbury.ac.nz/php/resources/math100/differential-equations/
- Worldwide Center of Mathematics. (21 de marzo de 2011). Applications of Differential Equations - Differential Calculus.[Video]. Recuperado de: https://youtu.be/fKHFbOeJrD0.