
Introducción
Un cuerpo rígido corresponde a un sistema de muchas partículas cuyas posiciones permanecen fijas, unas respecto a las otras. Es decir, si se somete dicho conjunto a una o varias fuerzas externas las distancias entre cualquier par de ellas siempre permanecerán invariantes en el tiempo, con el cuerpo en movimiento o en estado de reposo.
El principal interés en esta temática es analizar los movimientos de traslación, rotación y la combinación de estos, generados por fuerzas externas sobre un cuerpo rígido. También, se estudiarán dos ideas de gran importancia asociadas con los efectos de las fuerzas: el primero, es el momento de una fuerza con respecto a un punto en el espacio y otro, el momento de fuerza con respecto a un eje, utilizando para ello aspectos fundamentales del algebra vectorial tales como: el cálculo de productos escalares y vectoriales.
Finalmente, se establece la importancia de reemplazar cualquier sistema de fuerzas por un sistema de fuerza-par o cupla, de tal forma que se mantenga la equivalencia traslacional y rotacional del sistema.

En el estudio de las condiciones de equilibrio, el cuerpo rígido es una opción que facilita el análisis de las diferentes fuerzas variables externas a él.
Propósitos de aprendizaje
Propósito General
Explicar el momento de fuerza para un cuerpo rígido mediante las leyes del movimiento y el algebra vectorial.
Propósitos Específicos
- Distinguir las fuerzas internas y externas en un cuerpo rígido.
- Aplicar el principio de transmisibilidad.
- Definir el momento de fuerza.
- Calcular el momento de una fuerza en forma vectorial y escalar.
- Distinguir entre los movimientos de traslación y rotación de los cuerpos rígidos.
- Definir un sistema fuerza-par e identificar los efectos que se presentan en un cuerpo rígido.
- Diferenciar el momento de una fuerza con relación al de un par de fuerzas.

Fuerzas internas y externas, principio de transmisibilidad
En el estudio del equilibrio o dinámica de un cuerpo rígido es importante distinguir dos clases de fuerzas, las internas y las externas.
Las primeras corresponden a la interacción entre partículas dentro de un cuerpo rígido y determinan la cohesión o grado de rigidez. La función principal de estas fuerzas es mantener en equilibrio la estructura interna del cuerpo. Esto es posible, porque las fuerzas internas aparecen como pares y se anulan cumpliendo la 3ra ley de Newton.
Las fuerzas externas surgen de la interacción de agentes externos sobre el cuerpo rígido y establecen su estado de reposo o de movimiento.
El principio de transmisibilidad, por su parte, consiste en el efecto producido por una fuerza externa, el cual es el mismo si se cambia de posición esta fuerza sobre la línea de acción.

Producto vectorial de dos vectores
En el análisis de los efectos de las fuerzas externas sobre cuerpos rígidos es importante explicar el concepto de momento de una fuerza en un punto. Esto sugiere la introducción de un tipo de multiplicación entre dos vectores como es el producto vectorial para el cálculo de esta cantidad.
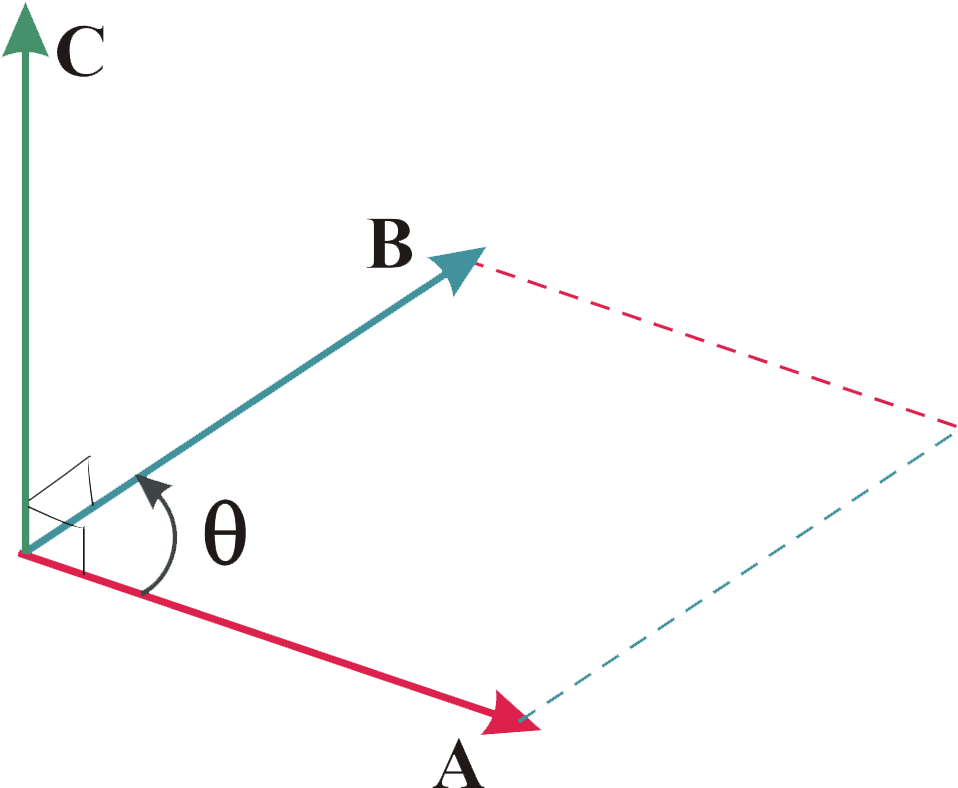
El momento de una fuerza en un punto corresponde a un producto vectorial de dos vectores. Por lo tanto, del algebra vectorial se define entonces el producto cruz de dos vectores A y B con un ángulo entre ellos de 0°< θ < 180°. El resultado es un vector C perpendicular al plano que contiene a los vectores A y B. La magnitud del vector C es el área del paralelogramo generado por los vectores A y B.
El producto vectorial es importante, ya que se deben evaluar más adelante las condiciones de equilibrio de rotación, lo cual es analizar directamente los momentos de fuerza donde el momento neto sea igual a cero.

En el caso de un cuerpo rígido que gira alrededor de un eje AB con una velocidad angular ω. La velocidad lineal v, en un punto de la trayectoria circular, está definida mediante el producto vectorial: v= ω×R. Es decir, el vector de velocidad angular perpendicular al radio R, genera un vector velocidad tangencial a la trayectoria circular.
Momento de una fuerza respecto a un punto
El momento de una fuerza, respecto a un punto, se define como el producto vectorial entre posición del punto de giro y el punto donde se aplica la fuerza, por la fuerza externa que genera el movimiento de rotación. Como ya se mencionó, el cálculo de la magnitud del momento o torque denotado por la letra Tao, se obtiene multiplicando las magnitudes de los vectores de fuerza y de posición por el seno del ángulo entre ellos.
El momento vectorial o vector momento tiene como magnitud τ y su dirección concuerda con el eje de rotación sobre el punto O. La dirección y sentido del vector de momento τ se determina mediante la regla de la mano derecha, tal como se explicó para el producto vectorial de dos vectores.
De igual forma, para el momento de una fuerza también se puede aplicar al principio de transmisibilidad, el cual incluye el sistema de fuerzas concurrentes.
 |
Material |

Momento de un par de fuerzas
Dos fuerzas que actúen sobre un objeto y tengan la misma magnitud, sus líneas de acción sea paralelas y trabajan en sentido contrario, se les conoce como un par o cupla, las cuales se caracterizan porque su suma produce una fuerza neta igual a cero. Sin embargo, la adición de sus momentos de torsión alrededor de un punto O arbitrario es diferente de este resultado, y por lo tanto, el objeto sobre el que actúan tiende a rotar.
Ahora bien, dos pares son equivalentes cuando sus efectos sobre un cuerpo rígido son los mismos, es decir, producen el mismo momento. Utilizando el principio de transmisibilidad y la ley del paralelogramo es posible encontrar un par de fuerzas equivalentes.
Para representarlas, basta con dibujar un vector que posea la misma magnitud, dirección y sentido del momento τ ⃗del par. El momento de par resultante o total se obtiene cuando se realiza la sumatoria sobre los momentos par en un punto dado sobre el cuerpo rígido.
|
|
Material |

Reducción de un sistema de fuerzas en una fuerza en O y en un par
Los efectos de traslación o rotación que puede tener una fuerza sobre un cuerpo están determinados por el punto donde actúa la fuerza y por la forma en la que se aplica.
En la figura se puede observar ejemplo de ello, la fuerza F está actuando en el punto p, sin embargo, en algunas situaciones es deseable realizar un estudio, sin alterar los efectos externos sobre el cuerpo, considerando la fuerza F en el punto O. Si dos fuerzas de igual magnitud, actuando sobre la misma línea de acción y con sentidos contrarios son aplicadas en O (fig. b), el sistema no se ve alterado. Paso siguiente, se cancelan las fuerzas F en p y –F en O. De esta manera, se ha conseguido una fuerza F aplicada en O (fig. c).
Este hecho es consecuencia de la utilización del principio de transmisibilidad. Es decir, la fuerza se considera como un vector deslizante que puede actuar en cualquier punto a lo largo de su línea de acción.
|
|
Material |
Resumen
En el estudio del equilibrio o dinámica de un cuerpo rígido es importante distinguir dos clases de fuerzas las internas y las externas. Los vectores fuerza con aplicación sobre cualquier punto de su línea de acción se conocen como vectores deslizantes y los efectos externos permanecen invariantes cuando se presenta una traslación de este tipo, esto corresponde al principio de transmisibilidad.
Ahora bien, en el caso de las rotaciones es indispensable estudiar momentos de fuerza, pero para ello se requiere conocer el producto vectorial o cruz entre dos vectores. Según el problema a solucionar este producto vectorial τ o M, aplicado al cálculo de un momento de fuerza, se puede utilizar para encontrar la distancia perpendicular desde un punto hasta una línea de acción.
Generar un momento de fuerza es posible, mediante el efecto neto de un par de fuerzas. Este momento es independiente en relación al punto donde se calcula, esto es un vector libre ocasionando una no alteración en su valor a medida que se traslada a otro punto. El par de fuerzas es equivalente si y solo si generan el mismo efecto en el cuerpo rígido, es decir, producen el mismo momento de fuerza.
Actividad de aprendizaje
 |
Le invitamos a realizar la siguiente actividad relacionada con el estudio del equilibrio. |

Considerar la grúa de carga del barco, como un cuerpo rígido, es de gran importancia para calcular cuánto peso puede soportar sin causar algún accidente o pérdida de mercancías.
Bibliografía ()
- Serway R. A. & Jewett J. W. (2005). Física para ciencias e ingeniería (6ª Ed.). México: Thomson.
- Beer, P. F., Johnston, E. R.. & Eisenberg, R. E. (2007). Mecánica vectorial para ingenieros Estatica. (8ª Ed.). México: McGraw-Hill.
- Hibbeler, R. C. (1997). Mecánica de materiales (3ª Ed.). México: Person
Referencias Web
- Arenas B (2012). Dinámica de un cuerpo rígido. Medellín: Universidad de Antioquia. Recuperado de: http://aprendeenlinea.udea.edu.co/lms/moodle/file.php/801/texcuerporigido_2012_.pdf