
Introducción
El ser humano ha aceptado hacer uso de tecnologías y máquinas desde hace siglos, maquinas que ha remplazado tareas demasiado exigentes para él y es gracias a ello que esa idea comenzó a hacerse realidad hacia finales del siglo XX.
Lo anterior se ha logrado mediante cambios sustanciales. En primer lugar, los autómatas programables o PLC’s, debido a su fácil programación, han sido determinantes en la modernización de las empresas, dando lugar a la sustitución de los sistemas de control basados en circuitos eléctricos, relés, interruptores y otros componentes eléctricos. Posteriormente, la incorporación de robots básicos, contribuyeron a sustituir perfectamente la realización de tareas repetitivas de los trabajadores y, en la actualidad ya se cuenta con una cantidad importante de robots trabajando en campos como la explotación de petróleo, construcción, minería, manufactura en líneas de proceso y exploración espacial, por mencionar tan solo algunas.
Desde esta perspectiva, es relevante que los futuros ingenieros aborden los contenidos presentados en esta Unidad, de tal forma que adquieran las competencias que solicita la cuarta revolución industrial.

Tanto la robótica como los PLC’s son utilizados ampliamente en la automatización de procesos, en busca de mejorar los tiempos de ciclo de producción, logrando aumentar la productividad, minimizando los errores y de manera repetitiva, garantizando la estandarización de los procesos para que esto sea visualizado en la calidad del producto final.
Propósitos de aprendizaje
Propósito general
Comprender conceptos básicos, nomenclatura, definiciones, antecedentes históricos y la evolución de la robótica, junto a los tipos de robot existentes.
Propósitos específicos
- Conocer la arquitectura de un PLC.
- Reconocer los antecedentes y la evolución de la robótica en el mundo.
- Diferenciar los tipos de robots y su clasificación según su función.

Controladores lógicos programables
Con la llegada de los autómatas programables, la industria sufrió un impulso importante, fueron sustituidos sistemas de control, logrando de forma notable que los procesos de producción se fueran flexibilizado. Se encuentran PLC’s en la industria (metalurgia, alimentos, producción de energía, platas químicas, entre otros.), pero también en las casas (aplicaciones domóticas para calefacción, iluminación y sistemas antirrobo) en los centros comerciales, hospitales, entre otros.
El PLC (Programmable Logic Controller), nombre proporcionado por IBM desde hace unas décadas, revolucionó la industria de la automatización industrial. Su nombre actual es Sistema Industrial de Control Automático, y está configurado para:
- Minimizar los costos y el tiempo de proceso.
- Reducir el mantenimiento de equipos.
- Maximizar el rendimiento.
Otro factor clave, que ha conducido al posicionamiento del PLC en la industria, se debe a los cambios importantes que han tenido los lenguajes de programación, puesto que ahora son sencillos, lo que permite flexibilizar el proceso de formación. Al presente, los lenguajes de programación de controladores lógicos programables se basan esquemas gráficos y lenguajes de texto.

En temas de comunicación, la implementación de un conjunto de PLC facilitaba la adquisición de datos a través de una red de intranet, sin embargo, en la actualidad la conexión a internet facilita el monitoreo en tiempo real del funcionamiento de la planta desde cualquier computadora, tanto in-situ como fuera de ella.
Controladores lógicos programables
Estructura básica
Las necesidades de la automatización de la industria automotriz norteamericana condujeron al ingeniero Estadounidense Dick Morley a inventar el PLC. Este dispositivo entro a sustituir en la manufactura de automóviles, las tareas de control, secuenciación, y lógica que para ese entonces realizaban relés, contadores, y controladores dedicados.
Lo anterior fue logrado en 1968, cuando la división de transmisiones automáticas de General Motors (GM Hydramatic), estableciera un concurso para diseñar un sistema que reemplazara los sistemas cableados.
En consecuencia, Bedford Associates de Boston desarrolló el PLC 084, denominado así porque fue la propuesta con el número ochenta y cuatro. Posteriormente, Bedford Associates fundó Modicon, (Modular Digital Controller o Controlador Digital Modular), que en la actualidad es Schneider Electric, dedicada a la manufactura y comercialización de controladores lógicos programables.
 |
Identifique las características y los componentes básicos de un PLC. |

Controladores lógicos programables
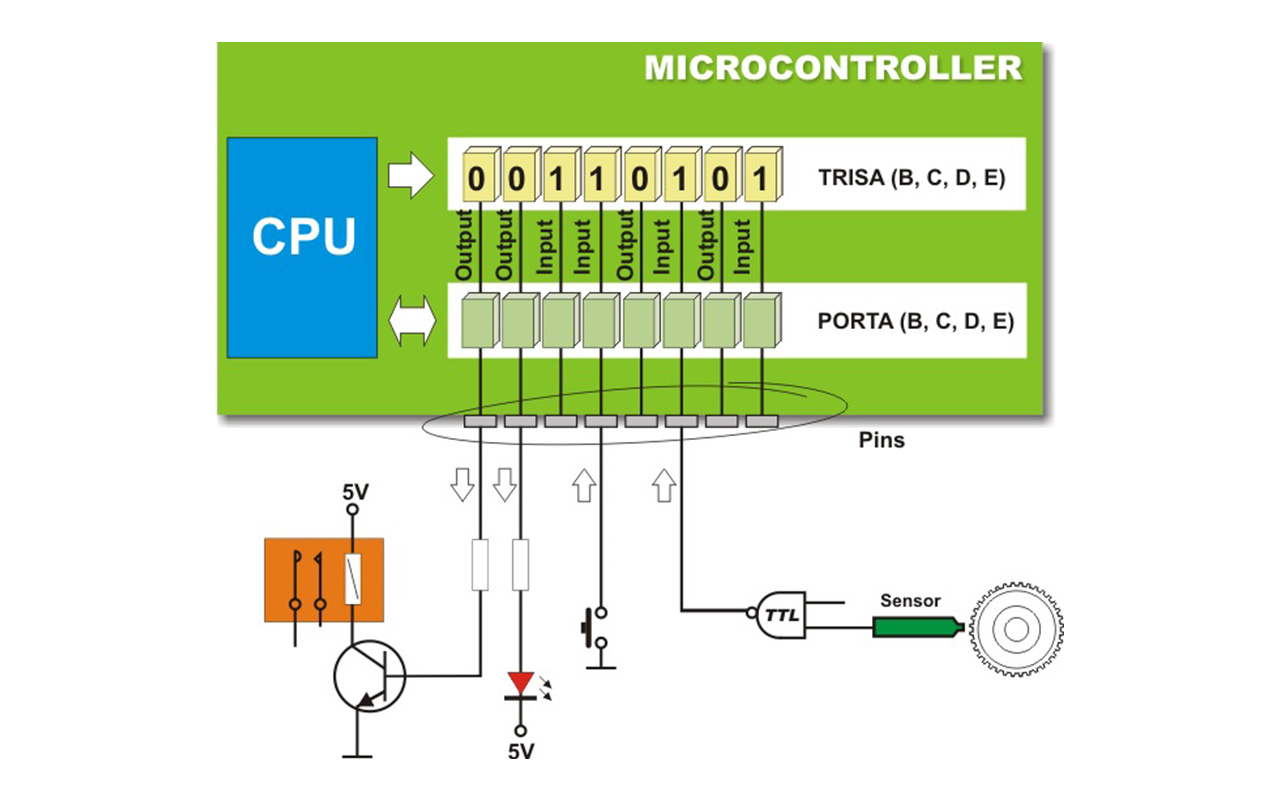
Procesamiento de entrada – salida
La Norma IEC-61131 permite identificar las características principales para la selección y aplicación de un PLC y sus periféricos, es decir, los módulos de entradas y salidas. Así mismo, establece los requisitos mínimos funcionales, los lenguajes de programación, directrices de aplicación y, define las comunicaciones entre los PLC´s y otros sistemas.
Un aspecto importante para estudiar está relacionado con el trabajo que desarrollan los módulos. Estos se encargan de la intercomunicación entre los dispositivos industriales exteriores al PLC (sensores, pulsadores, interruptores, entre otros) y los elementos que conforman la unidad central de proceso, lugar de almacenamiento y ejecución del programa de control. Lo anterior se lleva a cabo mediante circuitos electrónicos de baja potencia.
 |
Conozca los tipos de entradas y salidas y los criterios de selección del PLC. |

En un PLC no existe ninguna conexión física entre las entradas y las salidas, la conexión se realiza a través del programa.
Controladores lógicos programables
Programación
La estandarización en la programación del control industrial, bajo el estándar IEC 1131-3 ha definido para la programación de PLC’s los lenguajes de tipo literal y gráfico.
Existe otro lenguaje que en la actualidad se usa para programar PLC’s, este recibe el nombre de gráfico secuencial de funciones (grafcet). El gráfico secuencial de funciones (STL, SFC o Grafcet) es un lenguaje gráfico que proporciona una representación en forma de diagrama de las secuencias del programa, soporta selecciones alternativas de secuencia y secuencias paralelas.
Los elementos básicos son pasos y transiciones, los pasos consisten en partes de programa que son inhibidas hasta que una condición especificada por las transiciones es conocida. Como consecuencia de que las aplicaciones industriales funcionan en forma de pasos, el SFC es la forma lógica de especificar y programar al más alto nivel un PLC (Maya Palacios, González Hernández, & Ocampo Casados, 2017).
 |
Conozca algunos aspectos de los lenguajes de programación. |
 |
Material |

Controladores lógicos programables
Temporizadores, relevadores y contadores
Además de incorporar funciones lógicas, los controladores lógicos programables traen consigo otras funciones que permiten el control de acciones en función del tiempo, así como el almacenamiento de una señal y dispararla pasado un tiempo, o cumplida una cuota de conteo.
 |
Identifique otras funciones de los controladores lógicos programables. |

Un controlador lógico programable, más conocido por sus siglas en inglés PLC (Programmable Logic Controller) o por autómata programable, es una computadora utilizada en la ingeniería automática o automatización industrial, para automatizar procesos electromecánicos, electroneumáticos, electrohidráulicos, tales como el control de la maquinaria de la fábrica en líneas de montaje u otros procesos de producción así como atracciones mecánicas.
Controladores lógicos programables
Registro de corrimiento
Los autómatas programables tienen una función de procesamiento digital de datos que permite que cada dato almacenado o retenido en ubicaciones intermedias o temporales, por ejemplo, en una celda o localidad de la memoria, pueda transferirse a la siguiente cuando recibe un pulso. Esta función es conocida como Shif Register.
El uso de la memoria temporal y la transferencia de información son características básicas, por tanto, los registrosson circuitos secuenciales constituidos por biestables o flip- flops, donde cada uno de ellos maneja un bit de la palabra binaria.
 |
Un flip-flop es el nombre que recibe un elemento básico que puede permanecer en dos estados posibles durante un tiempo determinado. |
La función es llevada a cabo de forma sincrónica con la señal del reloj. La mayoría de los registros de desplazamiento incorporan funciones Reset y Clear para poner el sistema en “cero”, de tal forma que la limpieza del registro sea rápida y muy práctica.
En el registro de corrimiento, las combinaciones más comunes son: entrada serie y salida paralelo, entrada paralelo y salida serie.

¿Cómo se especifica un registro de corrimiento en un PLC?
La forma depende específicamente del PLC, sin embargo, de manera general, el programador debe definir en donde empieza el registro y el número de bits o etapas que conforman el registro. En la mayoría de los casos, para declarar el registro de corrimiento se usa el termino SFR xx.
Controladores lógicos programables
Manejo de datos
El contacto de relé es el elemento básico de programación. Puede referirse a una bobina lógica (Ox) o a una entrada discreta (1x). En programación de PLC’s, es usual emplear contactos de tipo con normalidad abierto, y normalmente cerrado.
Otro elemento usado en la programación de PLC’s, son las bobinas, utilizadas para activar la lógica dentro del programa del usuario y/o para controlar una salida discreta. Cuando una bobina no activa una salida se le denomina interna y, en ese caso, tiene el propósito de seguir la secuencia o lógica.
La variable de memoria es otro componente usado con el propósito de almacenar una señal en el proceso de la programación de un PLC. La memoria puede emplearse en lo que deseemos y, usualmente a las memorias se les designa con la letra M. Se distinguen dos tipos de macas de memoria, remanentes y no remanentes. Las primeras permanecerán en memoria, aunque apaguemos el autómata y las segundas se borrarán en cuanto apaguemos el autómata.
 |
Le invitamos a escuche el audio propuesto para profundizar en el tema manejo de datos. |


Controladores lógicos programables
Entrada y salida analógica
Es posible que, en aplicaciones industriales la magnitud de entrada al PLC sea una media de temperatura, presión, velocidad, etc., esto quiere decir que es de tipo análoga. Las señales análogas se deben tratar con conversores analógicos /digitales (ADC), de tal forma que ahora sea un código binario.
Asimismo, una respuesta binaria del PLC puede ser convertida usando un sistema digital/analógico (DAC), de tal forma que la señal de salida se puede usar para enviar señales de control a una gran variedad de elementos de proceso.
|
|
Para tener en cuenta... El tamaño de un palabra es normalmente de 10 bits o inferior; y esa palabra da una resolución de 1 parte en 1024 que corresponde a aproximadamente 0,01 V. |
La señales análogas se usan para controlar elementos de campo que responden a voltajes continuos; por ejemplo, para controlar una válvula reguladora de caudal en un sistema hidráulico, es posible que se requiera una señal de voltaje de operación entre 0 a 10 voltios en DC, de tal forma que podamos tener un volumen variable de fluido hidráulico para bombearse a los cilindros de una compuerta. En la anterior aplicación, es necesario una conversión de señal binaria a una analógica generada por un sistema (DAC), y es determinante la precisión del control.
Controladores lógicos programables
Simulación PLC
Algunos dispositivos admiten ingreso de funciones a través de display y teclas de cursor, sin embargo, otra alternativa para la programación es el uso de softwares que permiten la simulación a través del uso de lenguajes Ladder y de bloques funcionales.
|
|
Le invitamos a revisar estas dos aplicaciones que serán útiles para el desarrollo de la simulación de PLC. |

En la actualidad existen diversas formas de programar PLC’s.
Introducción a la robótica
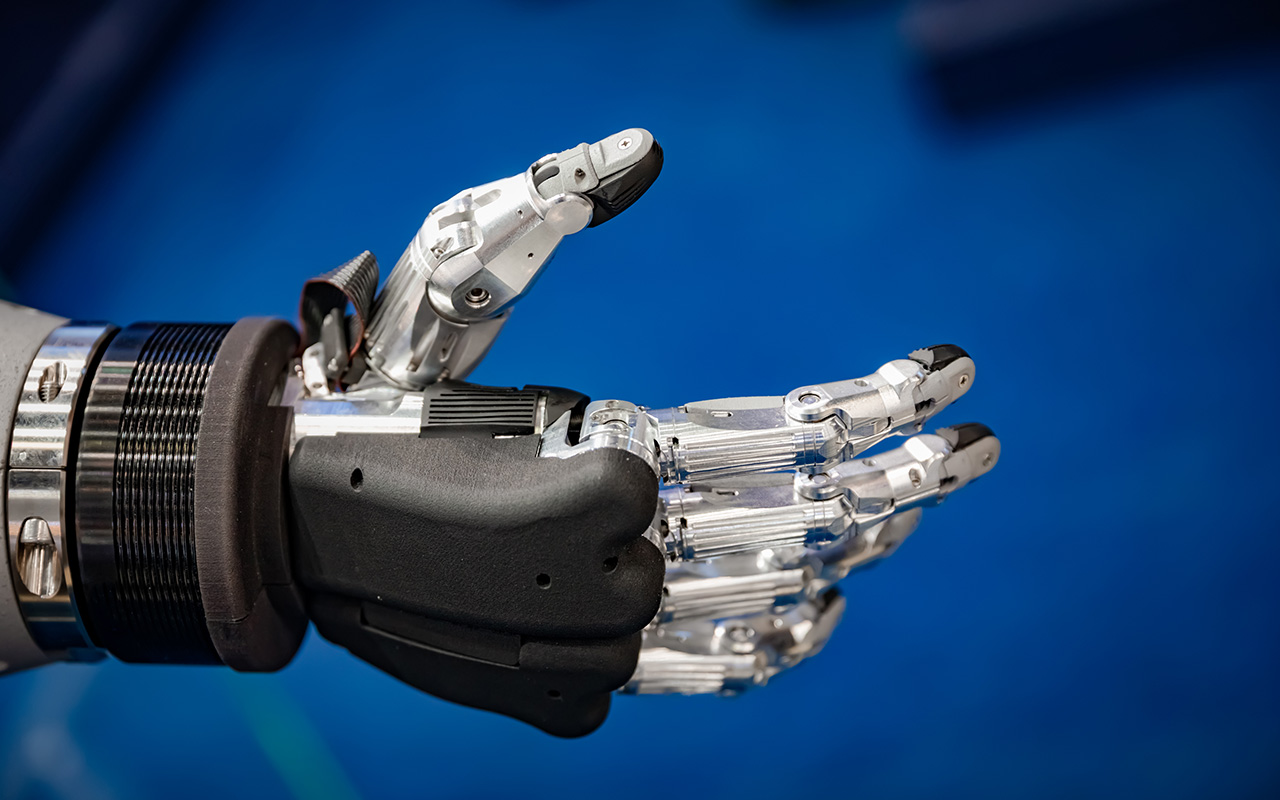
La mano del ser humano tiene la posibilidad de desarrollar funciones increíbles, por ejemplo, levantar y operar objetos, asistir en el posicionamiento y trasladarlos. Este perfecto sistema ha sido el modelo de robots industriales que tienen una función similar.
En un análisis tridimensional, la mano posee 22 grados de libertad y cuenta con sensores de temperatura, presión, además de diversos sistemas interconectados que posibilitan el movimiento.
No obstante, si fuera posible reproducir una mano cibernética, no podría clasificares como un robot, puesto que no cumpliría con el concepto propuesto por la Federación Internacional de Robótica (2017), “Manipulador multifuncional, controlado automáticamente, reprogramable en tres o más ejes, que puede estar fijo o móvil para uso en aplicaciones de automatización industrial”. Dicha definición propone el trabajo desde diversas disciplinas, (mecánica, electrónica, informática y control), de tal forma que su trabajo sea multidisciplinar para poner en marcha un robot.
En la actualidad, los robots industriales y los diseñados para otros fines, funcionan como un dispositivo multifuncional con mínimo seis grados de libertad, dotados de un carácter automático para que puedan realizar las tareas de transporte y manipulación de objetos de forma precisa. Lo anterior, se consigue mediante la implementación de sistemas de accionamiento neumático, hidráulico, eléctrico y electrónico.
Desde esta perspectiva, los contenidos abordados en esta Unidad permitirán a los futuros ingenieros estar a la vanguardia de la tecnología para que sean altamente competitivos.
Introducción a la robótica
Origen y desarrollo de la robótica
La palabra robot se asocia a la Praga de 1921, donde Karel Capek (1890-1938) presenta su obra de teatro R.U.R. (Rossum´s Universal Robot) y su origen es de la palabra eslava robota, la cual hace referencia a los trabajos realizados de manera forzada. La trama de la obra radicaba en que el hombre fabrica un robot y con el tiempo este se rebela y mata a los hombres convirtiéndose en la raza dominante.
De forma general, la palabra robot se asocia con dos conceptos derivados, los autómatas y los humanoides.
En el Antiguo Egipto, cuando estatuas cobraban vida despidiendo fuego o realizando movimientos de sus brazos mediante la acción de mecanismos actuados por los sacerdotes y otros que emitían sonidos, con el objetivo de mantener sumisión y obediencia.
Conozca aquí algunos datos de interés.
 |
Descubra como ha sido la evolución de la robótica. |
|
|
Material |

Introducción a la robótica
Tipos de robots
Existen múltiples clasificaciones para los robots, la primer diferenciación de los tipos de robots, corresponde a los robots de servicios y los robots industriales. Sin embargo, es posible mencionar otras categorizaciones a partir de su movilidad, autonomía y tamaño (Federación Internacional de Robótica, 2017).
|
|
Identifique los tipos de robots que existen de acuerdo con su autonomía, tamaño, servicio y movilidad. |
Introducción a la robótica
Morfología del robot
La morfología es un concepto importante porque describe características de la forma y estructura de los robots, por tanto, se describe a continuación los tipos de articulaciones y configuraciones clásicas de robots manipuladores.
Los manipuladores industriales de cadena cinemática abierta formada por un conjunto de eslabones son considerados robots manipuladores (Ollero, 2001). Precisamente son las articulaciones, quienes favorecen el movimiento relativo de los eslabones.
Podemos diferenciar cinco tipos de articulaciones usados en la robótica:
- Articulación de rotación
- Articulación prismática
- Articulación cilíndrica
- Articulación esférica
|
|
Conozca los tipos de articulaciones y los manipuladores en la morfología del robot. |
Actividad de aprendizaje
 |
Finalmente, para autoevaluar su proceso de aprendizaje realice la actividad propuesta. |
Los grados de libertad son el número de parámetros independientes que finjan el órgano terminal y suelen coincidir con el número de eslabones de la cadena cinemática (Ollero, 2001).
Resumen
El uso de PLC’s proporciona numerosos beneficios que se pueden resumir en el control de procesos bajo la integración de sistemas, reducción de gastos en recursos humanos, evita fuentes habituales de problemas por el alto nivel de flexibilidad y reusabilidad del software.
Cabe destacar que las técnicas de programación son utilizables en amplios sectores cuya presencia del control industrial soluciona problemas del contexto particular de un proceso, bajo la combinación adecuada de diferentes elementos que pueden provenir de diferentes fabricantes, programas y proyectos, obteniendo por ejemplo una gran posibilidad de conectividad y comunicación entre los distintos departamentos y compañías.
Otra perspectiva abordada en la Unidad permitió identificar que los sistemas robóticos, a pesar de remontarse a unas décadas atrás, han sido determinantes para el desarrollo de la industria pues estos pueden hacer tareas simples o complejas para las cuales el hombre tiene algún tipo de limitante.
Los grandes avances se han reflejado en la microelectrónica y los sistemas de censado y aprendizaje autónomo, aunque en la parte mecánica han sido menores pero importantes para mejorar la locomoción de los robots.
Caso de estudio
|
|
Le invitamos a realizar el siguiente caso de estudio que le permitirá finalizar el estudio de esta temática. |

La robótica pensada como el epicentro de múltiples ramas de ingeniería, en realidad ha evolucionado y se ha constituido en un reto para los investigadores que actualmente emplea una alta variedad de recursos materiales y humanos para avanzar en los desarrollos que demanda la sociedad

Bibliografía ()
- Federacion Internacional de robótica. (2017). The International Federation of Robotics. The VoxEU.
- Ollero, A. (2001). Robótica: manipuladores y robots móviles. In Marcombo S.A.
Referencias Web
- Conde, M. (2008). Generaciones de la robótica. Revista de Información, Tecnología, 126–130. Recuperado de http://www.revistasbolivianas.org.bo/pdf/rits/n1/n1a32.pdf
- Fallis, A. . (2013). Introducción a la robótica. In Journal of Chemical Information and Modeling. Recuperado de https://doi.org/10.1017/CBO9781107415324.004
- Maya , E., González, ., & Ocampo C,. (2017). Aprendizaje basado en problemas para la enseñanza de los PLC en la Universidad Tecnológica de Altamira / Learning based on the problems for the teaching of the PLC at the Technological University of Altamira. RIDE Revista Iberoamericana Para La Investigación y El Desarrollo Educativo, 8(15), 566–581. Recuperado de https://doi.org/10.23913/ride.v8i15.311
- Páez, H., Zamora, R., & Bohórquez, J. (2015). Programación de Controladores Lógicos (PLC) mediante Ladder y Lenguaje de Control Estructurado (SCL) en MATLAB. Rev.facultad de ingeniería. Recuperado de https://doi.org/10.19053/01211129.3555